Optimizer Pipeline¶
AquaCal’s calibration pipeline runs four sequential stages to produce a complete multi-camera calibration. This page explains how the pipeline works, what each stage optimizes, and the sparse Jacobian strategy used for efficient bundle adjustment.
Pipeline Overview¶
The calibration proceeds through four stages:
flowchart LR
I1["In-air videos<br/>Board params"] --> S1
I2["Underwater videos<br/>Board params"] --> S2
S1["**Stage 1**<br/>In-air Intrinsics<br/><small>(OpenCV)</small>"]
S2["**Stage 2**<br/>Extrinsic Init<br/><small>(BFS/PnP)</small>"]
S3["**Stage 3**<br/>Joint Refractive BA<br/><small>(nonlinear)</small>"]
S4["**Stage 4**<br/>Intrinsic Refinement<br/><small>(optional)</small>"]
S1 --> S2
S2 --> S3
S3 --> S4
S4 --> O["Refined K, R, t<br/>water_z, boards"]
classDef stage fill:#00897B,stroke:#004D40,color:#fff
classDef data fill:#E0F7FA,stroke:#4DD0E1,color:#263238
class S1,S2,S3,S4 stage
class I1,I2,O data
Each stage builds on the previous one, progressively refining the calibration. Stages 3 and 4 use the same optimization infrastructure (aquacal.calibration._optim_common), just with different parameter sets.
Stage 1: Intrinsic Calibration¶
What it does: Standard per-camera calibration using in-air checkerboard images.
Method: OpenCV’s cv2.calibrateCamera() (pinhole model) or cv2.fisheye.calibrate() (equidistant fisheye model).
Input:
In-air calibration videos (one per camera)
ChArUco board parameters (squares_x, squares_y, square_size, marker_size)
Output:
Camera intrinsic matrix K (3×3):
[[fx, 0, cx], [0, fy, cy], [0, 0, 1]]Distortion coefficients (5-element or 8-element array)
Why in-air? Intrinsic calibration (lens distortion, focal length, principal point) requires many observations at varied angles and depths. Performing this underwater would be impractical. Since intrinsics are properties of the lens, not the medium, we can calibrate in air and use the same intrinsics for underwater observations.
See aquacal.calibration.intrinsics.calibrate_intrinsics_all() for implementation.
Stage 2: Extrinsic Initialization¶
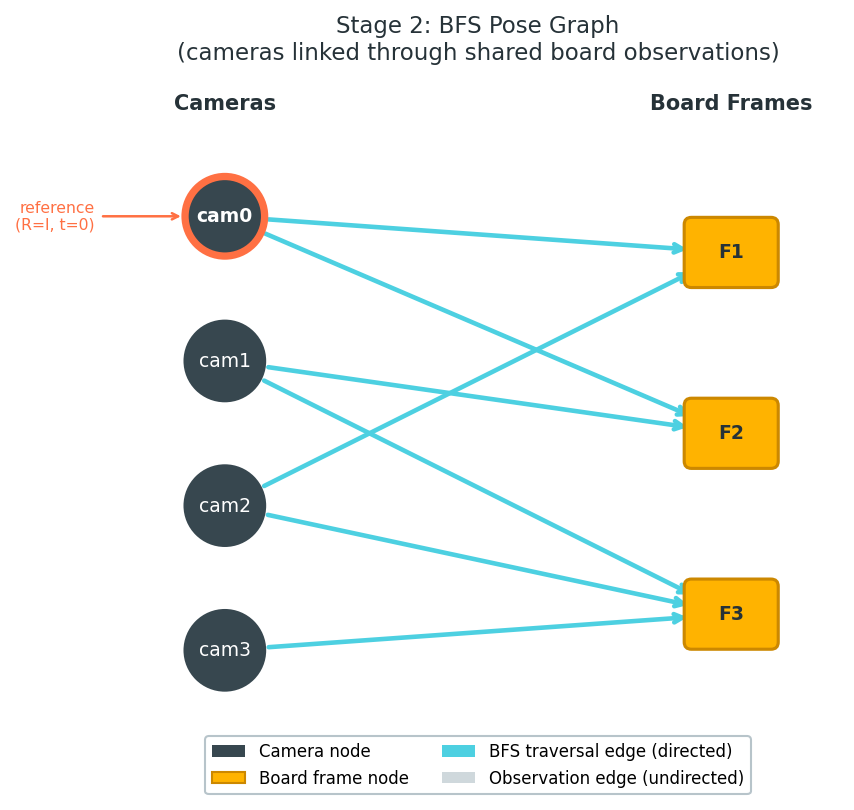
What it does: Initialize camera positions (extrinsics) and the water surface Z-coordinate by building a pose graph from shared underwater board observations.
Method:
Detect ChArUco corners in all cameras across all underwater frames
Build a pose graph: each camera-frame pair with detections is a node, edges connect nodes that observe the same board
BFS traversal: Starting from the reference camera (R=I, t=0), chain refractive PnP solutions through the graph to locate other cameras
Multi-frame averaging to reduce noise in extrinsic estimates
Compute initial water_z from the reference camera’s average interface distance
Input:
Underwater calibration videos (all cameras)
Intrinsics from Stage 1
ChArUco detections across all frames
Output:
Initial extrinsics (R, t) for each camera
Initial water_z (global water surface Z-coordinate)
Initial board poses (rvec, tvec) for each frame
Why BFS? Cameras in an AquaCal rig typically have non-overlapping fields of view. Direct pairwise camera-to-camera pose estimation isn’t possible. Instead, we use the calibration board as a “connector”: if cam0 and cam1 both observe the same board pose, we can chain their board-to-camera transforms to get a cam0-to-cam1 transform.
See aquacal.calibration.extrinsics.estimate_extrinsics() for implementation.
Stage 3: Joint Refractive Bundle Adjustment¶
What it does: Jointly optimize camera extrinsics, global water surface Z, and board poses to minimize refractive reprojection error.
Method: Nonlinear least-squares optimization using scipy.optimize.least_squares.
Parameters Optimized¶
The parameter vector layout is:
[tilt(0 or 2) | extrinsics(6*(N-1)) | water_z(1) | board_poses(6*F) | intrinsics(4*N or 0)]
where:
tilt (0 or 2): Optional interface tilt parameters (rx, ry) if
normal_fixed=False. Usually omitted (flat water assumption).extrinsics (6 per camera): Rodrigues vector (3) + translation vector (3) for each non-reference camera. Reference camera (cam0) is fixed at R=I, t=0.
water_z (1): Global water surface Z-coordinate. Same value for all cameras.
board_poses (6 per frame): Rodrigues vector (3) + translation vector (3) for each frame’s board pose.
intrinsics (0): Not optimized in Stage 3 (deferred to Stage 4 if requested).
Example: For a 3-camera rig with 50 frames:
Extrinsics: 6 × (3 - 1) = 12 parameters
water_z: 1 parameter
Board poses: 6 × 50 = 300 parameters
Total: 313 parameters
Cost Function¶
The cost function computes refractive reprojection error for every observed corner across all cameras and frames:
where:
i = camera index
j = frame index
k = corner index within that frame
Q_{j,k} is the 3D world position of corner k in frame j (computed from board pose)
The refractive projection uses the Newton-Raphson solver (see Refractive Geometry) to account for light bending at the water surface.
Loss function: Soft-L1 (Huber-like) loss for robustness to outliers:
This down-weights large residuals (e.g., detection errors, board motion blur) while preserving gradient information.
Bounds¶
water_z:
[0.01, 2.0]meters (must be positive and below cameras; upper bound is generous)Board tvec[2] (Z-coordinate): Must be greater than water_z (boards are underwater)
Extrinsic rvec: Unbounded (rotations can take any value)
Extrinsic tvec: Unbounded (but typically stay near initial values from Stage 2)
See aquacal.calibration.interface_estimation.optimize_interface() for implementation.
Gotcha: water_z is unobservable in non-refractive mode
When running calibration with n_air = n_water = 1.0 (as a comparison baseline to standard calibration), water_z has zero analytical gradient. Light travels in straight lines regardless of the interface position.
Despite this, water_z may drift during optimization due to:
Boundary penalties: Soft constraint to keep board Z > water_z pushes water_z downward
Numerical noise: In a flat cost valley, small numerical errors accumulate
The final water_z value in non-refractive mode is arbitrary and meaningless. All other parameters (extrinsics, board poses) are unaffected.
Use refractive mode (default n_water = 1.333) for actual calibration. Non-refractive mode is useful only for controlled comparisons.
Stage 4: Intrinsic Refinement (Optional)¶
What it does: Re-optimize all parameters from Stage 3 plus per-camera focal length and principal point.
Method: Same as Stage 3, but the parameter vector includes:
intrinsics(4*N): [fx_0, fy_0, cx_0, cy_0, fx_1, fy_1, cx_1, cy_1, ...]
appended to the end (after board poses).
When to use:
Use Stage 4 if initial intrinsic calibration was noisy (few in-air frames, poor coverage)
Skip Stage 4 if intrinsics are well-determined from Stage 1 (typical case)
Refining intrinsics increases parameter count by 4N and can slow convergence. It’s most useful when intrinsic estimates are suspect.
Note: Distortion coefficients are always held fixed. Only (fx, fy, cx, cy) are refined.
See aquacal.calibration.refinement.joint_refinement() for implementation.
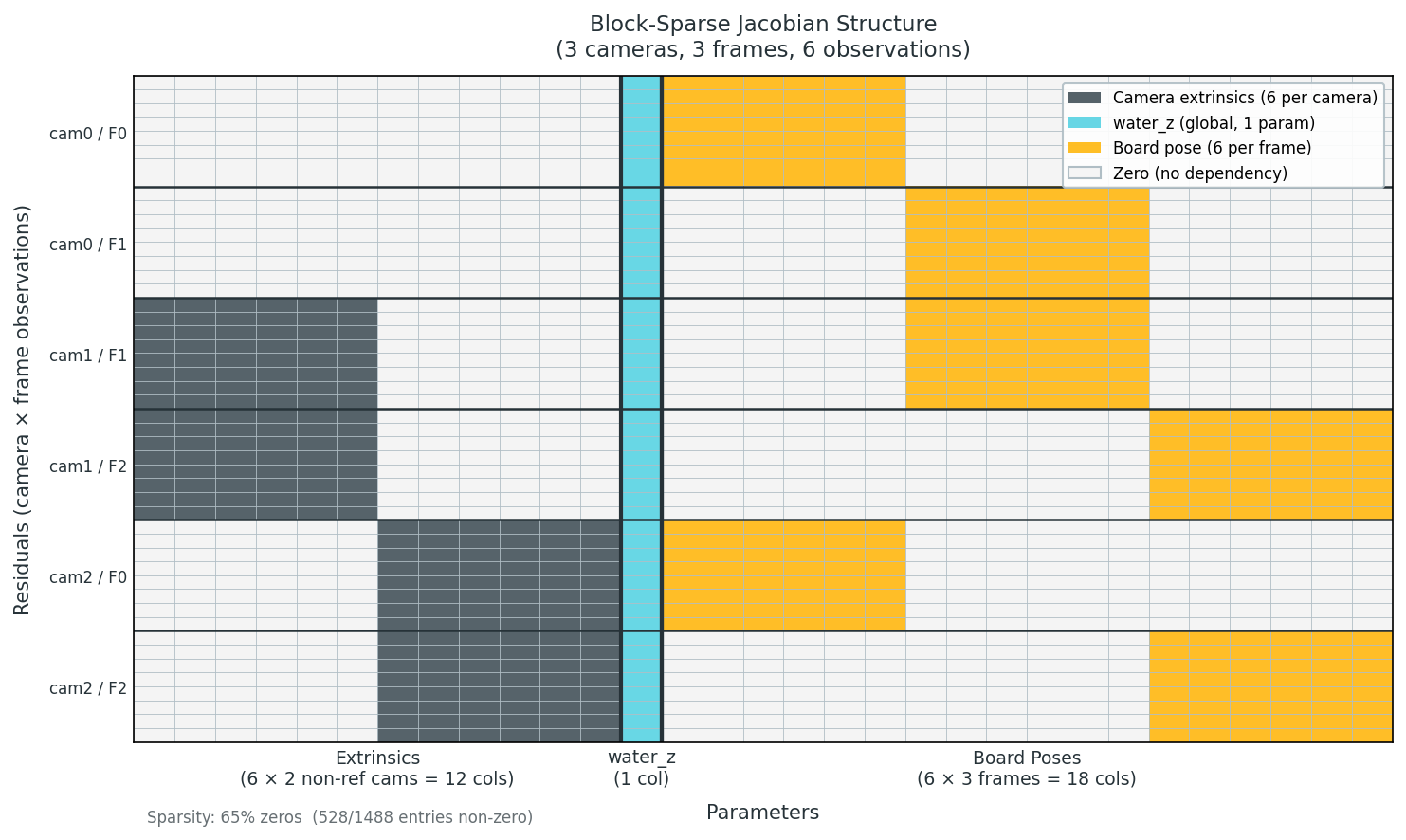
Sparse Jacobian Strategy¶
Bundle adjustment with hundreds of parameters is computationally expensive. The Jacobian matrix (derivatives of residuals w.r.t. parameters) is sparse: each reprojection residual depends on only a small subset of parameters.
Block-Sparse Structure¶
Each residual (2D reprojection error of one corner) depends on:
6 extrinsic params (for the camera observing it)
1 water_z param (global)
6 board pose params (for the frame containing it)
4 intrinsic params (for the camera, if refining intrinsics)
Total: at most 14-17 columns touched per residual row.
For a 13-camera, 100-frame rig:
Parameters: ~630 (extrinsics + water_z + board poses)
Each row touches ~13 columns → 98% sparse
Sparse Finite Differences with Dense Solver¶
scipy.optimize.least_squares supports Jacobian sparsity via the jac_sparsity parameter, but this forces the LSMR trust-region solver, which can diverge on ill-conditioned bundle adjustment problems.
AquaCal uses a custom Jacobian callable that:
Computes the Jacobian via sparse finite differences using
scipy.optimize._numdiff.approx_derivativewith column groupingReturns a dense matrix (
.toarray())Allows the exact (QR) trust-region solver to be used (stable, better convergence)
Column grouping reduces the number of function evaluations: independent columns can be finite-differenced simultaneously. For the 630-parameter rig:
Without grouping: 630 evaluations
With grouping: ~50 groups → ~12× fewer evaluations
For very large problems (e.g., 1000+ parameters), a dense_threshold parameter automatically switches to sparse (LSMR) mode to avoid memory overflow.
See aquacal.calibration._optim_common.make_sparse_jacobian_func() for implementation.
Note: Sparse Jacobian is an advanced optimization
The sparse Jacobian strategy is transparent to most users. It’s enabled by default and auto-tunes based on problem size.
If you’re modifying the calibration pipeline to add new parameter types, you’ll need to update build_jacobian_sparsity() to reflect which residuals depend on which parameters.
Auxiliary Camera Registration¶
Some cameras (e.g., wide-angle overview cameras) may degrade the joint optimization due to:
Poor intrinsic calibration (fisheye lenses are harder to calibrate)
Different viewing geometry (viewing at steep angles increases refractive effects)
AquaCal supports auxiliary cameras that are excluded from Stages 2-4 and registered post-hoc against fixed board poses and water_z.
Method:
Run Stages 1-4 with primary cameras only
For each auxiliary camera: 6-parameter (extrinsics-only) or 10-parameter (extrinsics + intrinsics) optimization against fixed board poses
This prevents auxiliary cameras from poisoning the primary solution while still providing calibrated extrinsics for all cameras.
See aquacal.calibration.interface_estimation.register_auxiliary_camera() for implementation.
Camera Models¶
AquaCal supports three distortion models for intrinsic calibration (Stage 1). Choosing the right model depends on your lens type and available calibration data.
Standard Pinhole Model (5 parameters)¶
Distortion coefficients: k1, k2, p1, p2, k3
Radial distortion: Polynomial model $\( r_{\text{distorted}} = r (1 + k_1 r^2 + k_2 r^4 + k_3 r^6) \)$
Tangential distortion: Accounts for lens decentering (p1, p2)
When to use:
Default for most cameras
Lenses with moderate distortion (< 90° field of view)
Standard rectilinear lenses
Auto-simplification: With few calibration frames, higher-order coefficients (k3, k2) can overfit, causing the distortion polynomial to diverge outside the calibrated region. AquaCal detects this via monotonicity checks and automatically retries with simpler models:
Full model: k1, k2, p1, p2, k3 (5 parameters)
If roundtrip validation fails: Fix k3 = 0 (4 parameters)
If still failing: Fix k3 = k2 = 0 (2 radial parameters: k1, p1, p2)
This auto-simplification prevents overfitting while preserving model accuracy for well-calibrated cases.
Implementation: See aquacal.calibration.intrinsics.calibrate_intrinsics_single() (lines 351-379) for the progressive simplification logic.
Rational Model (8 parameters)¶
Distortion coefficients: k1, k2, k3, k4, k5, k6, p1, p2
Radial distortion: Rational polynomial (numerator and denominator) $\( r_{\text{distorted}} = r \frac{1 + k_1 r^2 + k_2 r^4 + k_3 r^6}{1 + k_4 r^2 + k_5 r^4 + k_6 r^6} \)$
When to use:
Wide-angle lenses with extreme barrel or pincushion distortion
Standard 5-parameter model gives RMS > 1.0 pixels despite good calibration data
You have 50+ in-air calibration frames with good spatial coverage
Auto-simplification: ❌ No — Rational model does not auto-simplify. If you suspect overfitting (very low Stage 1 RMS but high validation errors), downgrade to the standard model.
Configuration:
rational_model_cameras:
- cam1 # Wide-angle camera needing 8-parameter model
Note: Rational model cameras cannot be fisheye cameras (mutually exclusive).
Fisheye Model (4 parameters, equidistant)¶
Distortion coefficients: k1, k2, k3, k4 (equidistant projection model)
Projection: Equidistant fisheye model (not polynomial radial) $\( r_{\text{distorted}} = \theta (1 + k_1 \theta^2 + k_2 \theta^4 + k_3 \theta^6 + k_4 \theta^8) \)$ where θ is the angle from optical axis.
When to use:
True fisheye lenses (> 120° field of view)
GoPro cameras (depending on lens mode)
Ultra-wide security cameras
Auto-simplification: ❌ No — Fisheye model does not auto-simplify. If calibration quality is poor, check video quality and spatial coverage.
Configuration:
auxiliary_cameras:
- cam2 # Fisheye cameras must be auxiliary
fisheye_cameras:
- cam2 # Subset of auxiliary_cameras
Important constraints:
Fisheye cameras must be listed in
auxiliary_cameras(cannot participate in primary Stage 2-4 optimization)Fisheye cameras cannot also be rational model cameras
Allowed Camera Combinations¶
Camera Lists |
Constraints |
|---|---|
|
First camera is the reference camera (world origin) |
|
Must not overlap with |
|
Can be in |
|
Must be a subset of |
Examples:
✅ Valid:
cameras: [cam0, cam1] # Primary cameras, standard 5-param model
auxiliary_cameras: [cam2, cam3]
rational_model_cameras: [cam1] # cam1 uses 8-param model
fisheye_cameras: [cam3] # cam3 is auxiliary + fisheye
❌ Invalid:
cameras: [cam0]
auxiliary_cameras: [cam1]
fisheye_cameras: [cam0] # ERROR: cam0 is primary, not auxiliary
❌ Invalid:
cameras: [cam0]
rational_model_cameras: [cam1]
fisheye_cameras: [cam1] # ERROR: rational and fisheye are mutually exclusive
Signs of Overfitting¶
If your Stage 1 RMS is very low (< 0.2 pixels) but you see any of these symptoms, you may have an overfitted distortion model:
High round-trip undistortion errors (warnings printed during Stage 1)
Validation errors in Stage 3/4 much higher than training errors
Distortion correction produces visible artifacts at image edges
Distortion polynomial “blows up” outside the calibrated image region
For standard model: Auto-simplification should catch this automatically.
For rational or fisheye models: Manually downgrade to the standard model by removing the camera from rational_model_cameras or fisheye_cameras.
For practical troubleshooting, see the Camera Models and Overfitting section in the Troubleshooting guide.
See Also¶
Refractive Geometry — How refractive projection works and why it matters
Coordinate Conventions — Understanding extrinsics (R, t) and camera position C
aquacal.calibration— Calibration pipeline API referenceaquacal.calibration._optim_common— Shared optimization utilities (parameter packing, Jacobian sparsity)